Trang 9
Học xong bài này em sẽ:
- Biết được nguyên lí hoạt động và một số bộ phận chính của bảng mạch điều khiển.
- Biết được động cơ là cơ cấu chấp hành chính trong robot.
Khởi động
Hình 2.1 là hai mẫu robot được sử dụng để giảng dạy và thực hành. Trên các robot có nhiều dây điện kết nối các bộ phận của robot với một bảng mạch điện tử. Hãy thảo luận để tìm hiểu vai trò của bảng mạch điện tử quan trọng này của robot.

Hình 2.1. Một số mẫu robot
1. Bảng mạch điều khiển
Hoạt động 1: Tìm hiểu vai trò và chức năng của bảng mạch điều khiển
Thảo luận nhóm về cơ chế hoạt động của robot: Bộ phận nào là quan trọng nhất chi phối mọi hoạt động của robot?
Trang 10
a) Bảng mạch điều khiển là gì?
Bảng mạch điều khiển (còn được gọi là bảng mạch chính) bao gồm các bộ phận cơ bản là chip vi điều khiển (Micro-Controller) kết hợp với bộ nhớ, các mô đun vào/ra và các bộ chuyển đổi tín hiệu,....
Bảng mạch điều khiển của robot thực hiện chức năng quan trọng nhất trong robot là xử lí tín hiệu thu nhận được và đưa ra các quyết định điều khiển robot. Vì thế bảng mạch điều khiển còn được coi là bộ não của robot. Mỗi bảng mạch điều khiển thường đi kèm với phần mềm hệ thống cho phép lập trình bằng các ngôn ngữ khác nhau để điều khiển các cơ cấu chấp hành và phụ kiện tiếp nhận điều khiển của robot. Phần mềm hệ thống đi kèm bảng mạch điều khiển và các chương trình ứng dụng do người lập trình đưa vào để điều khiển robot có thể coi là phần hồn của robot, cấu thành nên phần mềm của robot.
Bảng mạch điều khiển hoạt động theo sơ đồ sau:

Nhận dữ liệu vào từ các cảm biến (nhiệt độ, độ ẩm, khoảng cách, màu sắc,...) hoặc tín hiệu điều khiển (nút bấm) được nối với bảng mạch điều khiển thông qua các cổng vào/ra.
Chip vi điều khiển sẽ xử lí dữ liệu vào theo hướng dẫn của chương trình điều khiển được nạp vào bộ nhớ từ trước.
Kết quả xử lí – dữ liệu ra được chuyển thành các lệnh điều khiển các cơ cấu chấp hành và phụ kiện tiếp nhận điều khiển như màn hình, đèn, còi,....
Các bước trên sẽ được lặp đi, lặp lại cho đến khi thoả mãn điều kiện dùng trong bộ lệnh đã nạp hoặc nguồn điện của bảng mạch điều khiển bị ngắt.
Bảng 2.1. Các bộ phận cơ bản và kiểu kết nối với bảng mạch điều khiển
| Các bộ phận cơ bản | Nhiệm vụ | Kiểu kết nối thường gặp |
| Chip vi điều khiển | Điều khiển việc nhận dữ liệu hoặc xuất dữ liệu thông qua các cổng vào/ra. Xử lí dữ liệu theo bộ lệnh đã được lập trình. | Hàn cố định hoặc gắn được trên để. |
| Bộ nhớ | Bộ nhớ có thể có ba dạng như sau: – Bộ nhớ tạm (RAM) dùng cho việc tính toán dữ liệu. – Bộ nhớ cố định (ROM) lưu trữ các chương trình (bao gồm PROM, EPROM, EEPROM,...). – Bộ nhớ lưu dữ liệu (văn bản, hình ảnh, video, tệp tin cấu hình,...) thường là một thẻ nhớ được gắn vào bảng mạch điều khiển qua một khe cắm mở rộng. | Hàn cố định hoặc cắm vào khe cắm. |
Trang 11
| Các bộ phận cơ bản | Nhiệm vụ | Kiểu kết nối thường gặp |
| Cổng kết nối nguồn điện | Cổng kết nối nguồn điện (bộ chuyển đổi điện một Dây dẫn chiều hoặc pin) với bảng mạch điều khiển. | Dây dẫn |
| Các cổng vào/ra | Các cổng kết nối với các cảm biến, phụ kiện tiếp Hàn cố định nhận điều khiển dùng để nhận và gửi ra các dữ liệu hành động. | Hàn cố định |
Câu hỏi
Theo em, bộ nhớ làm nhiệm vụ gì trong bảng mạch điều khiển của robot?
| Hoạt động 2: Bảng mạch điều khiển trong G-Robot Hãy tìm hiểu bảng mạch điều khiển được sử dụng trong G-Robot. |
b) Bảng mạch điều khiển trong robot
Kiến thức mới
Bảng mạch điều khiển trong các robot nói chung đều được thiết kế dựa trên các nền tảng thiết kế mở. Nhờ vậy, nó có thể dễ dàng kết nối với các cảm biến hay các cơ cấu chấp hành và phụ kiện tiếp nhận điều khiển một cách dễ dàng, phù hợp với việc sử dụng trong môi trường giáo dục.
Một trong các bảng mạch thuộc loại nêu trên đó là bảng mạch điều khiển của G-Robot (Hình 2.2).

Nút chuyển chế độ
Đèn hồng ngoại
Còi
Vòng tròn LED
Nút khởi động lại
Các cổng RJ11 kết nối với cảm biến ngoài
Cổng kết nối USB nạp chương trình
Công tắc chọn nguồn
Nguồn 6, 9, 12 V
Các cổng RJ11 kết nối với cảm biến ngoài
Cổng kết nối động cơ DC M1, M2
Công tắc bluetooth
Trang 12
2. Động cơ – cơ cấu chấp hành chính trong robot
| Hoạt động 3: Làm quen với một số loại động cơ trong robot Có hai loại động cơ thường dùng cho robot là động cơ DC và động cơ servo. Thảo luận để tìm hiểu về sự khác nhau giữa hai loại động cơ này. |
a) Một số loại động cơ trong robot
Kiến thức mới
Cơ cấu chấp hành được hiểu là thiết bị chuyển đổi năng lượng thành chuyển động. Trong robot cơ cấu chấp hành chính là các loại động cơ thực hiện việc chuyển đổi năng lượng điện thành các chuyển động của robot.
Động cơ DC

Hình 2.3. Động cơ DC và bánh xe giúp robot di chuyển
Là loại động cơ điện 1 chiều dùng để thực hiện các chuyển động với vận tốc không đổi trong những khoảng thời gian xác định, ví dụ quay các bánh xe để robot di chuyển từ vị trí này sang vị trí khác.
Động cơ servo

Hình 2.4. Động cơ servo và cánh tay máy gắp đồ vật
Động cơ servo dùng trong robot là động cơ có khả năng phản hồi vị trí cuối cùng của trục quay. Đầu vào cho điều khiển của nó là tín hiệu (tương tự hoặc số) đại diện cho vị trí cuối cùng và hướng quay của trục quay. Trong robot, động cơ servo thường dùng để điều khiển các cử động nâng, hạ đến vị trí thích hợp, ví dụ điều khiển cánh tay máy để di chuyển các đồ vật.
Trang 13
b) Kết nối động cơ với robot
Động cơ DC
Hầu hết các robot hiện nay đều thiết kế sẵn hai cổng để kết nối với động cơ DC điều khiển bánh xe chạy. Thông thường, động cơ DC ứng với bánh xe bên trái được kí hiệu là M1, động cơ DC ứng với bánh xe bên phải được kí hiệu là M2. Khi lắp ghép chúng ta cần xác định rõ các động cơ bánh xe bên trái và bên phải ứng các cổng M1, M2. Các động cơ này sẽ được ghép nối với bánh xe và kết nối cứng với bảng mạch của robot.
Tất cả các robot có bánh xe chuyển động đều được cung cấp nguồn điện từ hệ thống pin lắp vào robot.
Sau đây là sơ đồ kết nối hai động cơ DC M1, M2 với bảng mạch của robot.

Hình 2.5. Sơ đồ kết nối động cơ DC vào bảng mạch
M1, M2
Vị trí lắp hai động cơ DC M1 và M2 trên bảng mạch
Các bước kết nối động cơ DC (M1, M2) với robot.
• Kết nối robot với nguồn điện (USB, DC Adapter hoặc pin).
• Kết nối các động cơ DC M1 và M2 với các cổng M1, M2.
• Nạp lệnh điều khiển robot đi thẳng và kiểm tra hoạt động của động cơ DC M1, M2 bằng cách quan sát hai động cơ xoay cùng chiều.
Động cơ servo
Tuỳ vào thiết kế bảng mạch điều khiển của robot mà việc kết nối động cơ servo có thể khác nhau. Với một số bảng mạch, động cơ servo có thể kết nối trực tiếp với các cổng RJxx. Một số robot khác thì được thiết kế các cổng riêng cho động cơ servo. Mỗi robot có thể lắp đặt hai động cơ servo.
Trang 14

Hình 2.6. Sơ đồ kết nối động cơ servo với robot
Động cơ servo
Động cơ servo có thể kết nối với một trong các cổng RJxx
Để kết nối động cơ servo với robot cần thực hiện theo các bước sau:
• Kết nối robot với nguồn điện (USB, DC Adapter hoặc pin).
• Kết nối các động cơ servo với cổng giao tiếp mở rộng bằng dây nối chuẩn RJxx (Mỗi robot có tối thiểu 04 cổng giao tiếp RJxx để kết nối đến thiết bị, phụ kiện tiếp nhận điều khiển).
• Nạp lệnh điều khiển động cơ servo xoay các góc 0o, 90°, 180° và kiểm tra hoạt động của động cơ servo bằng cách quan sát góc xoay của động cơ servo.
Câu hỏi
1. Vì sao các bảng mạch của robot thường có hai cổng kết nối động cơ DC?
2. Vì sao các robot lại thường có hai cổng kết nối động cơ servo?
LUYỆN TẬP
1. Tại sao lại gọi bàng mạch điều khiển là bộ não của robot
2. Nếu chúng ta lắp động cơ bên trái vào cổng M2, động cơ bên phải vào cổng M1 thì lắp đúng hay sai? Giải thích lí do.
VẬN DỤNG
1. Nếu robot sử dụng pin để chạy động cơ DC, theo em khi nguồn điện của pin xuống thấp thì công suất của động cơ DC có bị ảnh hưởng không?
2. Truy cập Intemet để tìm hiểu một số thông tin chính liên quan tới các bảng mạch điều khiển của Adruino và Microbit (vài nét về lịch sử hình thành; mục đích sử dụng; ngôn ngữ lập trình dùng cho các bảng mạch đó,...).
Các Bài Học Khác
Chuyên đề học tập Tin học 10 - Bài 3: Cảm Biến Và Phụ Kiện Dùng Trong Robot - Tìm hiểu về các loại cảm biến, nguyên lý hoạt động và vai trò của chúng cùng các phụ kiện trong hệ thống robot.
Xem thêm ⟶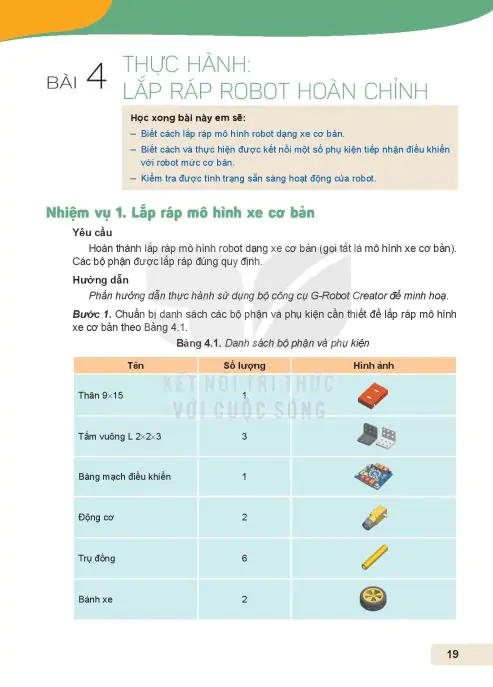
Chuyên đề học tập Tin học 10 - Bài 4: Thực Hành: Lắp Ráp Robot Hoàn Chỉnh - Kết nối các thành phần để tạo ra một robot giáo dục hoàn chỉnh.
Xem thêm ⟶







Bình Luận
Để Lại Bình Luận Của Bạn