Nội Dung Chính
Trang 25
Sau bài học này em sẽ:
- Biết vai trò của phần mềm lập trình điều khiển robot.
- Biết quy trình kết nối robot với máy tính.
- Biết cách điều khiển robot bằng phần mềm thông qua wifi và bluetooth.
Câu hỏi
Theo em con người giao tiếp với máy móc như thế nào? Em đã nghe đến phần mềm điều khiển robot bao giờ chưa? Hãy liệt kê tên một số phần mềm lập trình điều khiển robot mà em đã biết.
1. Phần mềm lập trình điều khiển robot
| Hoạt động 1: Tìm hiểu phần mềm lập trình điều khiển robot Đọc, thảo luận về vai trò và ứng dụng của phần mềm lập trình điều khiển robot. |
a) Khái niệm chung về chương trình điều khiển robot
Robot có thể được coi là một thiết bị xử lí thông tin tương tự như máy tính, được gắn kèm theo các cơ cấu chấp hành và phụ kiện tiếp nhận điều khiển. Do vậy, cần có chương trình được cài đặt trong bộ nhớ để làm cho robot có thể hoạt động được. Điều này cũng tương tự như các máy tính, muốn hoạt động được cần cài đặt hệ điều hành và các phần mềm ứng dụng.
Với robot, khái niệm chương trình điều khiển có thể hiểu là các chương trình được cài đặt trong bộ nhớ của robot ở trạng thái sẵn sàng thực hiện các hoạt động theo yêu cầu.
Chương trình điều khiển robot có thể chia làm hai loại:
• Chương trình hệ thống do các nhà sản xuất robot như Lego, Makeblock, GaraSTEM,... phát triển và cài đặt trong bộ nhớ để hỗ trợ điều khiển robot.
• Chương trình điều khiển robot hoạt động theo yêu cầu của người sử dụng (phần mềm ứng dụng). Với loại phần mềm này, người sử dụng cần viết chương trình bằng một môi trường hỗ trợ lập trình robot (thường gọi là phần mềm lập trình điều khiển robot). Sau khi nạp chương trình vào bộ nhớ, người sử dụng có thể vận hành và điều khiển robot theo chương trình đó.
Trang 26
b) Phần mềm lập trình điều khiển robot
Hiện nay có nhiều phần mềm lập trình điều khiển robot như Arduino IDE, GaraBlock, KidsCode,... Việc viết và nạp chương trình giải quyết những nhiệm vụ cụ thể cho robot đều được thực hiện nhờ các phần mềm lập trình điều khiển robot. Phải căn cứ vào chủng loại robot để lựa chọn và cài đặt phần mềm lập trình điều khiển cụ thể. Việc cài đặt các phần mềm lập trình điều khiển robot lên máy tính hoàn toàn tương tự như các phần mềm khác.

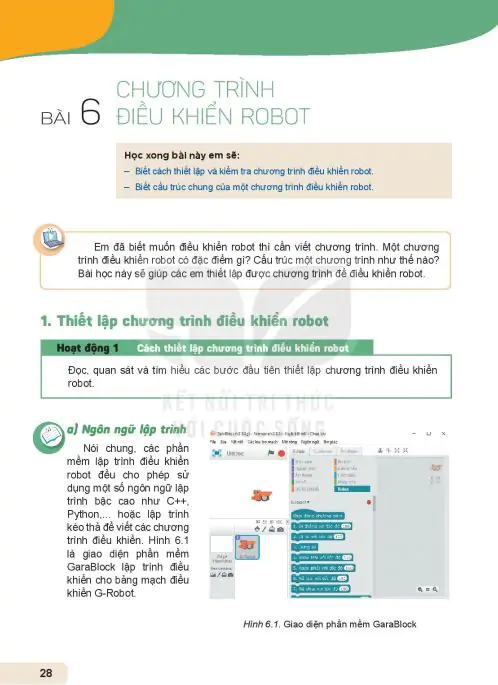
Hình 5.1. Phần mềm lập trình Arduino IDE

Hình 5.2. Phần mềm lập trình GaraBlock
Các phần mềm lập trình điều khiển robot thường có giao diện dễ sử dụng và hỗ trợ lập trình bằng một trong các ngôn ngữ lập trình phổ biến như Scratch, Python, C++.
| Phần mềm lập trình điều khiển robot giúp tạo ra các chương trình điều khiển và nạp chúng vào bộ nhớ của robot. |
2. Nạp và chạy chương trình điều khiển robot
| Hoạt động 2: Tìm hiểu trình tự các bước nạp và chạy chương trình điều khiển robot Em hãy đọc và quan sát hình để tìm hiểu trình tự các bước nạp và chạy chương trình điều khiển robot. |
a) Nạp chương trình vào bộ nhớ của robot
Sau khi đã hoàn thành việc viết chương trình, em cần thực hiện các bước sau để nạp chương trình đó vào bộ nhớ của robot.
Bước 1. Kết nối robot với máy tính.
Việc kết nối này có thể được thực hiện bằng một trong hai cách:
- Kết nối qua hình thức không dây: Có thể kết nối robot với máy tính thông qua chuẩn kết nối như bluetooth, wifi.
- Kết nối qua hình thức có dây: Có thể sử dụng dây nối trung gian để kết nối robot với máy tính. Hình 5,3 minh hoạ bảng mạch G-Robot được kết nối với máy tính thông qua dây cáp microUSB.

Hình 5.3. Kết nối bảng mạch điều khiển G-Robot
Bước 2. Từ giao diện của phần mềm lập trình điều khiển, thực hiện câu lệnh tương ứng để nạp chương trình vào bộ nhớ robot. Cần phải lưu ý không được ngắt kết nối máy tính với robot cho tới khi nhận được thông báo quá trình nạp chương trình đã hoàn tất. Nếu vì lí do nào đó mà quá trình nạp chương trình bị giản đoạn, em phải thực hiện lại câu lệnh nạp chương trình từ đầu.
b) Chạy chương trình điều khiển robot
Sau khi thực hiện thành công việc nạp chương trình vào bộ nhớ máy tính, chương trình sẽ được lưu ở đó cho tới khi em thực hiện việc nạp một chương trình mới cho
robot. Để chạy chương trình đó, em cần ngắt kết nối máy tinh với robot và bật công tắc nguồn cho robot hoạt động theo chương trình đã nạp. Em cần quan sát các hành động của robot để biết chương trình đã viết đúng hay chưa. Nếu chưa thì cần chỉnh sửa chương trình trên máy tính rồi thực hiện lại quá trình nêu trên từ đầu. Cứ như vậy, quá trình hoàn thiện một chương trình điều khiển robot sẽ là: viết – chạy thử – sửa – chạy thử...
Câu hỏi
Trong quá trình nạp chương trình nếu bị ngắt kết nối em cần phải làm gì?
| • Sau khi viết xong chương trình cho robot trên máy tính, em cần thực hiện việc kết nối robot với máy tính và sử dụng phần mềm lập trình điều khiển để nạp chương trình đã viết vào bộ nhớ của robot. • Để chạy chương trình điều khiển đã được nạp trong bộ nhớ, em cần ngắt kết nối robot với máy tính, bật công tắc nguồn cho robot hoạt động theo chương trình đã nạp. |
3. Kết nối điều khiển robot qua wifi và bluetooth
Bên cạnh việc kết nối và lập trình cho robot thông qua phần mềm lập trình trên máy tính, các robot còn được trang bị công nghệ wifi hoặc bluetooth để có thể điều khiển từ xa. Sau đây là quy trình điều khiển robot qua kết nối không dây (wifi hoặc bluetooth):
Bước 1. Bật chế độ kết nối không dây (wifi hoặc bluetooth) của robot.
Bước 2. Bật chương trình (app) trên điện thoại di động và vào chế độ robot từ xa.
Bước 3. Kết nối robot với mạng không dây (wifi hoặc bluetooth).
Bước 4. Điều khiển robot hoạt động thông qua vì điều khiển không dây hoặc chương trình trên điện thoại di động.

Hình 5.4. Chương trình điều khiển G-Robot
| Có thể điều khiển robot bằng kết nối không dây (wifi hoặc bluetooth). |
LUYỆN TẬP
Mỗi lần điều chỉnh chương trình điều khiển robot em có cần thực hiện lại các bước nạp chương trinh cho robot không?
VẬN DỤNG
Em hãy cho biết đâu là sự khác biệt lớn nhất giữa việc thực hiện chương trình thông thường trên máy tính và việc thực hiện chương trình điều khiển cho robot.
Các Bài Học Khác
Chuyên đề học tập Tin học 10 - Bài 6: Chương Trình Điều Khiển Robot - Phân tích cấu trúc và nguyên lí hoạt động của các chương trình lập trình robot.
Xem thêm ⟶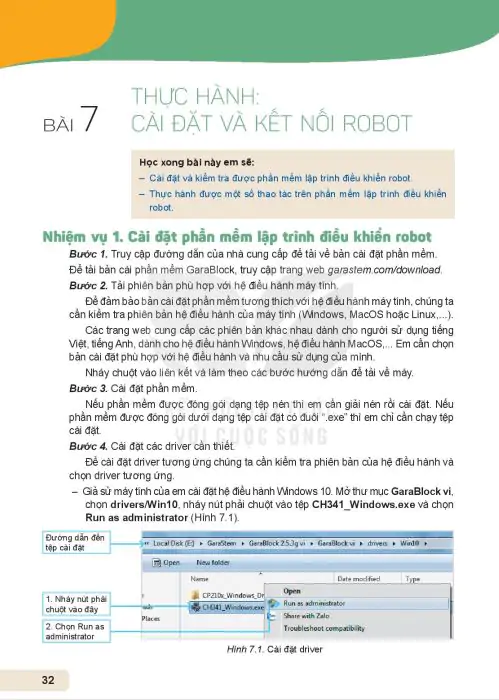
Chuyên đề học tập Tin học 10 - Bài 7: Thực Hành: Cài Đặt Và Kết Nối Robot - Thiết lập phần mềm và liên kết giữa robot với máy tính.
Xem thêm ⟶







Bình Luận
Để Lại Bình Luận Của Bạn